·CUAV and PX4 jointly build
·Adopt FMUv5 hardware standard
CUAV V5+ Flight Controller
CUAV V5 Plus Flight Controller is an advanced autopilot manufactured by CUAV. The board is based on the Pixhawk FMUv5 design standard, the external interface uses the Dronecode standard pinouts, and the modular design allows the users to customize their own carrier board. The autopilot is compatible with both PX4 and ArduPilot firmware. CUAV V5+ is ideal for academic research and commercial system’s integration.
Faster F765 processor
CUAV V5+ selects the STM32F765 processor with better performance. Its main frequency is up to 216MHZ, and it contains 2 MB FLASH/512K RAM. The clock speed is higher, the RAM is larger, and the speed will be greatly improved.
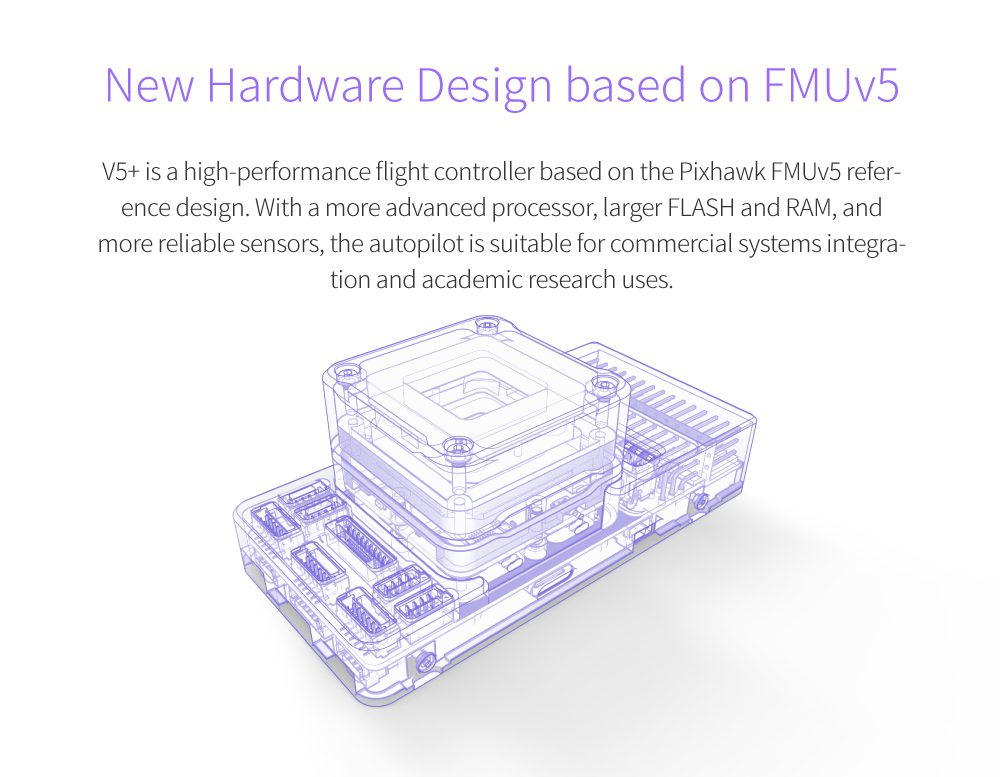
New FMUv5 hardware design
CUAV V5+ is a high-performance flight control system created by CUAV based on FMUv5 open source hardware. It has a more advanced processor than FMUv3, a larger FLASH and RAM, and a more stable and reliable sensor.
Support RTK centimeter positioning
CUAV V5+ autopilot supports RTK positioning module to achieve accurate centimeter positioning to meet your higher positioning requirements. (RTK positioning module needs to be purchased separately)
PX4 official standard
CUAV is a premium member of Dronecode and has been working to promote the PX4 open source project. The V5+ interface is designed according to the official PX4 standard to ensure compatibility and interoperability with hardware and software products in the PX4 ecosystem.
Multi-sensor redundancy combination
Built-in 5 sets of sensors, the flight controller monitors the multichannel sensor data in real time, and performs redundant switching immediately after the failure, improving flight safety and stability.